| ПеМфВщбЏ |
ЕуЁЂЯпЁЂУцПеМфМИКЮЖдЯѓЖМгаУїШЗЕФБпНчОиаЮЃЈEnvelopЃЉЁЂБпНчЃЈBoundaryЃЉЁЂФкВПЃЈInteriorЃЉКЭЭтВПЃЈExteriorЃЉЃЌОпЬхЖЈвхМћБэ 2.1ЁЃМИКЮЖдЯѓЕФПеМфЮЛжУЙиЯЕБШНЯЃЌЪЕжЪЩЯОЭЪЧЖдЯрЛЅМфБпНчОиаЮЁЂБпНчЁЂФкВПКЭЭтВПЙиЯЕЕФБШНЯЁЃУїШЗетаЉЖЈвхЃЌНЋЗЧГЃгажњгкРэНтПеМфВщбЏИїЫузгЕФКЌвхЁЃ
Бэ 2.1 МИКЮЖдЯѓЯрЙиЖЈвх
|
МИКЮЖдЯѓ |
БпНчОиаЮ |
БпНч |
ФкВП |
ЭтВП |
|
Еу |
УЛгаБпНчОиаЮ |
УЛгаБпНч |
ЕуЖдЯѓБОЩэ |
ЕуЖдЯѓБОЩэЭтЕФЧјгђ |
|
Яп |
ЯпЖдЯѓЕФзюаЁЭтНгОиаЮ |
ЯпЖдЯѓЕФЖЫЕу |
ЯпЖдЯѓБОЩэГ§ШЅЖЫЕуЕФВПЗж |
ЯпЖдЯѓБОЩэЭтЕФЧјгђ |
|
Уц |
УцЖдЯѓЕФзюаЁЭтНгОиаЮ |
УцЖдЯѓПижЦБпЕФВЂМЏ |
УцЖдЯѓГ§ШЅБпНчКѓЕФЧјгђ |
УцЖдЯѓБОЩэЭтЕФЧјгђ |
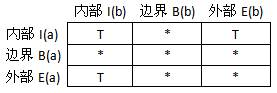
SuperMap зщМўВњЦЗ ВЩгУOGCЕФОХНЛФЃаЭРДЖЈвхВЛЭЌЮЌЖШЁЂВЛЭЌРраЭЕФМИКЮЖдЯѓжЎМфЕФПеМфЙиЯЕЁЃетИіФЃаЭЗжБ№гУI(a)ЁЂB(a)ЁЂE(a)БэЪОМИКЮЖдЯѓ a ЕФФкВПЁЂБпНчКЭЭтВПЕФМЏКЯЃЌЭЈЙ§ЖдСНИіМИКЮЖдЯѓЕФЭтВПЁЂБпНчЁЂФкВПМЏКЯНјааЧѓНЛЃЌВЂНЋЧѓНЛНсЙћЬюГфЕНОХНЛФЃаЭБэжаЃЌШчБэ 2.2ЫљЪОЕФЁЃОХНЛФЃаЭдкМЦЫуЛњФкВПвдЪ§зщаЮЪНДцДЂЮЊвЛИі3*3ЕФОиеѓЁЃОХНЛФЃаЭЪЪКЯгкЫљгаМИКЮЖдЯѓЁЃ
Бэ 2.2 ОХНЛФЃаЭБэ
|
|
ФкВПI(b) |
БпНчB(b) |
ЭтВПE(b) |
|
ФкВПI(a) |
dim(I(a) ЁЩ I(b)) |
dim(I(a) ЁЩ B(b)) |
dim(I(a) ЁЩ E(b)) |
|
БпНчB(a) |
dim(B(a) ЁЩ I(b)) |
dim(B(a) ЁЩ B(b)) |
dim(B(a) ЁЩ E(b)) |
|
ЭтВПE(a) |
dim(E(a) ЁЩ I(b)) |
dim(E(a) ЁЩ B(b)) |
dim(E(a) ЁЩ E(b)) |
МИКЮЖдЯѓЕФФкВПЁЂЭтВПЁЂБпНчЧѓНЛЪБЃЌКЏЪ§dim()ЗЕЛиЧѓНЛНсЙћМЏКЯЕФЮЌЪ§ЃЌЗжБ№ЮЊ-1ЁЂ0ЁЂ1КЭ2ЫФИіжЕЃЌЮвУЧЛсИљОнdim()ЕФШЁжЕЃЌЮЊОХНЛФЃаЭНјааИГжЕЃЌЙцдђШчЯТЃК
1. Шєdim()=0ЃЌ1Лђ2ЃЌдђНЛМЏДцдкЃЌИГжЕЮЊTЃЛ
2. Шєdim()= -1ЃЌдђНЛМЏВЛДцдкЃЌИГжЕЮЊFЃЛ
3. ШєВЛПМТЧДЫжжЯрНЛЧщПіЃЌдђВЛЙмНЛМЏДцдкгыЗёЃЌИГжЕЮЊ*ЁЃ
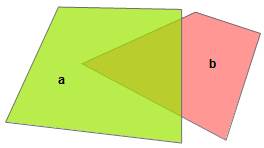
ЯТУцгУУцВПЗжжиЕўЮЊР§РДЫЕУїОХНЛФЃаЭЕФИГжЕЃЌШчЭМ 2‑1ЫљЪОЃЌУцaгыУцbВПЗжжиЕўЃЌдкДЫЮвУЧЖЈвхвЛИіStringРраЭЪ§зщMatrix[9]РДДцДЂОХНЛФЃаЭЕФжЕЃЌдђЃК
1. dim(I(a) ЁЩ I(b))=2ЃЌдђОХНЛФЃаЭжаMatrix(0)=TЃЌдкетРяашвЊЫЕУїЕФЪЧЃЌШєЯпгыЯпoverlapЃЌдђdim(I(a) ЁЩ I(b))=1ЃЛШєЕугыЕуoverlapЃЌдђdim(I(a) ЁЩ I(b))=0ЁЃ
2. dim(I(a) ЁЩ B(b))=1ЁЂdim(B(a) ЁЩ I(b))=1ЃЌЕЋЪЧЖдгкУцВПЗжжиЕўЃЌЮвУЧВЛЙиаФaЁЂbЕФФкВПгыБпНчНЛМЏЧщПіЃЌвђДЫMatrix(1)= Matrix(3)=*ЃЛ
3. dim(I(a) ЁЩ E(b))=2ЃЌдђОХНЛФЃаЭжаMatrix(2)=TЃЛ
4. dim(B(a) ЁЩ B(b))=0ЃЌЕЋЪЧЖдгкУцВПЗжжиЕўЃЌЮвУЧВЛЙиаФaЕФБпНчгыbЕФБпНчНЛМЏЧщПіЃЌвђДЫMatrix(4)=*ЃЛ
5. dim(B(a) ЁЩ E(b))=1ЁЂdim(E(a) ЁЩ B(b))=1ЃЌЕЋЪЧЖдгкУцВПЗжжиЕўЃЌЮвУЧВЛЙиаФaЁЂbЕФБпНчгыЭтВПЕФНЛМЏЧщПіЃЌвђДЫMatrix(5)= Matrix(7)=*ЃЛ
6. dim(E(a) ЁЩ I(b))=2ЃЌдђОХНЛФЃаЭжаMatrix(6)=TЃЛ
7. dim(E(a) ЁЩ E(b))=2ЃЌЕЋЪЧЖдгкУцВПЗжжиЕўЃЌЮвУЧВЛЙиаФaЕФФкВПгыbЕФБпНчНЛМЏЧщПіЃЌвђДЫMatrix(8)=*ЁЃ
|
|
|
|
|
ЭМ 2‑1 ОйР§ЫЕУїЁАУцВПЗжжиЕўЁБгыЦфОХНЛФЃаЭ |